
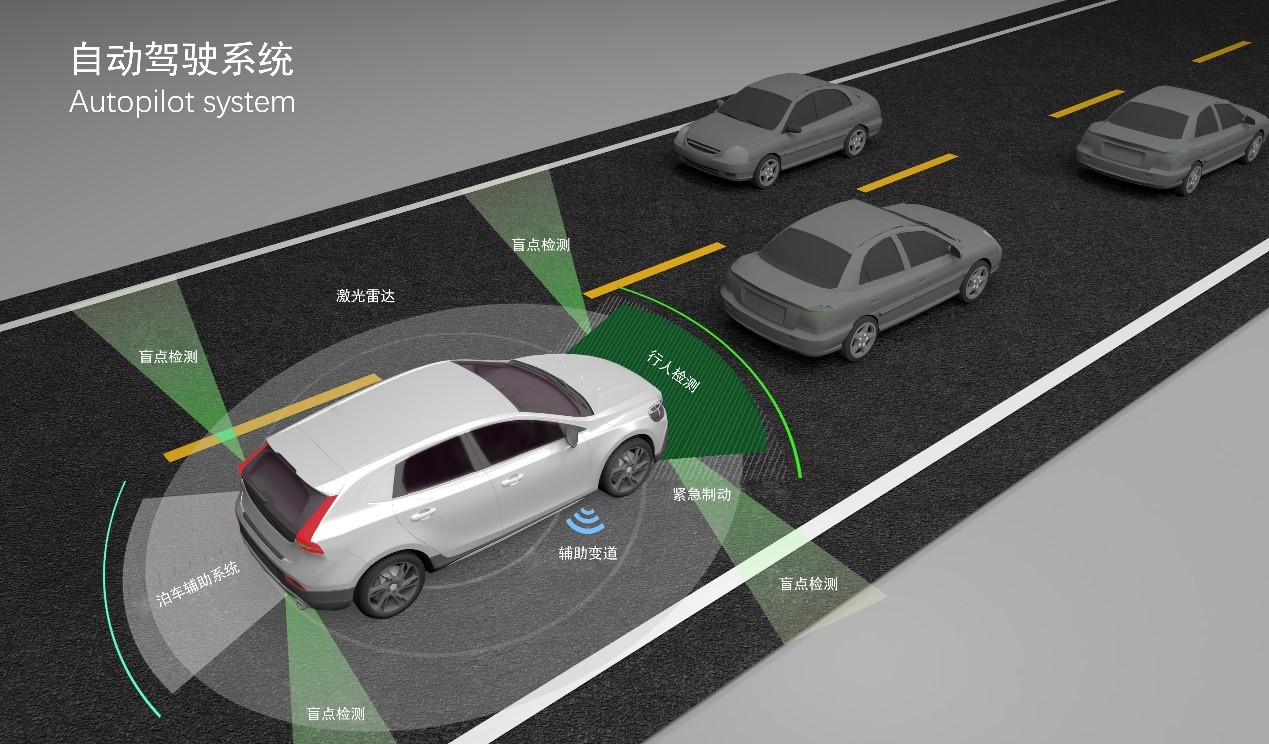
汽车自动驾驶技术包括视频摄像头、雷达传感器以及激光测距器来了解周围的交通状况,并通过一个详尽的地图(通过有人驾驶汽车采集的地图)对前方的道路进行导航。自动驾驶技术从业务流程上分为3个核心的流程,分别是环境感知定位、决策规划、执行控制。其中环境感知定位是前提:主要通过传感器技术和摄像头、GPS等技术获取汽车行驶过程中的环境指标,并且将数据采集。当今的半自动驾驶系统采用了各种各样数量和设计的雷达和摄像头系统包括摄像头、激光雷达、毫米波雷达等技术。
自动驾驶使用4~5个2K(2048*1152)的摄像头,频率达到120Hz,单个摄像头带宽可达到:2048*1152*120*32bit(RGB)= 1GB/s。整体车载5个摄像头基本要满足5GB/s的数据传输带宽。加上多个激光雷达,毫米波雷达的数据传输,自动驾驶需要更高的数据传输带宽和实时数据处理能力。
公司车载记录设备支持10Gbps 的数据速率,支持多条并行数据的传输,足够满足自动驾驶车载数据采集系统的数据管理和存储功能。
